De PID-regelaar (Proportioneel Integrerend Differentiërend wiki) is een van de meest voorkomende regelaars in de procesregeling.
- Algemeen overzicht werking PID regelaar
|
|---|

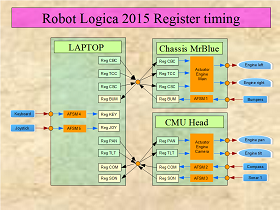
De Commanded variable wordt gevoed door de Robot logica.
|
- De PID regelaar / controller
|
|---|
- Proportioneel
Propotioneel voorbeeld is voetballer / meet de mate van fout en beweegt in een proportie / present
- Integrerend
Integrated voorbeeld is drone / gaat naar motor=0 op 50 meter en dan valt hij /past
- Differentiërend
Differentiërend voorbeeld is tegen overshooting / meet de mate waarin de fout afneemt/ future
Niet alle 3 de PID elementen moeten worden gebruikt. Een D regeling kan worden weggelaten, oftewel zijn weegfactor wordt op 0 gezet. Wat dan overblijft heet een PI regelaar. Maar ook daar kan de I worden weggelaten, oftewel ook zijn weegfactor op 0 zetten. Dan blijft er een P regelaar over. |
- Voorbeeld
|
|---|
| Hoe regel je de motoren van een robot om bij het laadstation te komen. |
| Algemene informatie over dit onderdeelAlgemene informatie test |
|---|
| Menu groep | Algemeen | | Laatste verandering | 2021-09-20 |
Warning: include(/var/www/html/robotigs/includes/wishlistperpart.php): Failed to open stream: No such file or directory in /var/www/html/robotigs/includes/parts_header.php on line 128
Warning: include(): Failed opening '/var/www/html/robotigs/includes/wishlistperpart.php' for inclusion (include_path='.:/usr/share/php') in /var/www/html/robotigs/includes/parts_header.php on line 128
| 
Afb 1: Dia15
Afb 2: Dia11
Afb 3: Dia5
Afb 4: Dia13
Afb 5: Dia4
|